
时间差分(Temporal-Difference\ TD)学习是强化学习的一种新颖的方法。TD 学习是蒙特卡洛(MC)思想和动态规划(DP)思想的结合。与蒙特卡罗方法一样,TD 方法可以直接从经验中学习,与 DP 一样,TD 方法部分基于其他状态的值函数估计来更新当前状态的估计, TD、DP 和 Monte Carlo 方法之间的关系将会是强化学习中反复探讨的问题,这三个方法的差异主要来自它们对策略评估的差异。和之前一样,我们首先介绍策略评估,或者叫预测问题,即估计给定策略的值函数;然后介绍控制问题,即寻找最优策略。
策略验证
TD 方法和 Monte Carlo 方法都使用经验来进行策略评估。蒙特卡罗方法等到当前的 episode 结束后,将获得的 return 对值函数进行迭代更新。适用于 nonstationary 问题的 MC 方法如下
V(S_t) = V(S_t) + \alpha[G_t-V(S_t)]. 而 TD 方法的公式在Monte Carlo 方法的基础之上做改进如下
V(S_t) = V(S_t) + \alpha[R_{t+1}+\gamma V(S_{t+1})-V(S_t)],公式中将 G_t 替换为 R_{t+1},然后又在增量项中增加了 \gamma V(S_{t+1})。
将 G_t 替换为 R_{t+1} 意味着在时间差分方法中,不再是等每个episode结束之后才更新值函数,而是在每次做完 action 获得 reward 之后就进行迭代更新。在增量项中增加的 \gamma V(S_{t+1}) 是从动态规划来的,依据的公式是
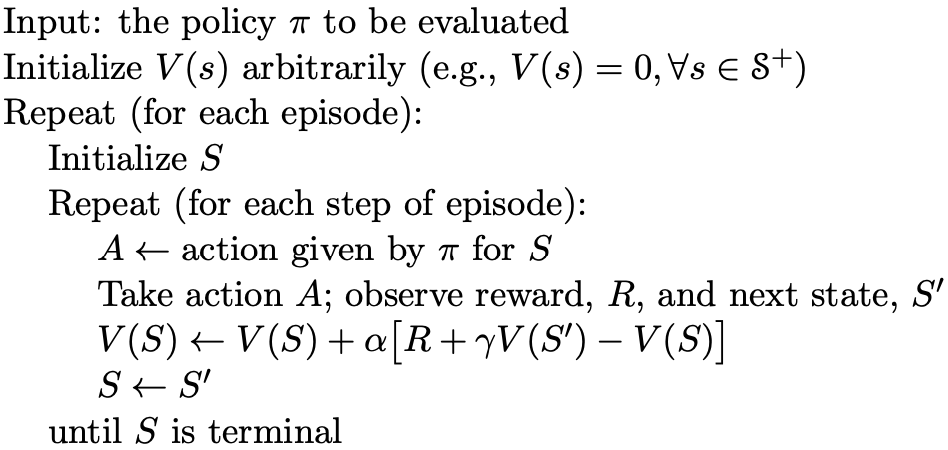
v_\pi(s) = \mathbb{E}_\pi[R_{t+1}+\gamma v_\pi(S_{t+1})|S_t=s].于是,时间差分方法的策略评估的伪代码如下所示
策略优化
关于策略优化,分为两种:on-policy 和 off-policy。
on-policy优化
在on-policy优化中,我们需要更新维护的是动作值函数,而不是状态值函数,通过动作值函数,可以直接基于前面提到的 greedy 方法进行策略优化。
动作值函数的迭代与状态值函数类似,如下
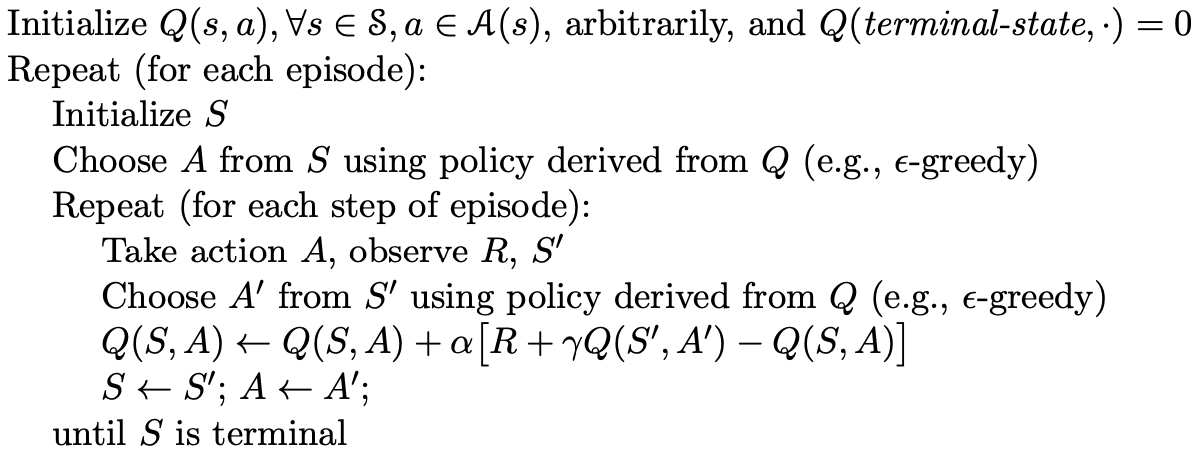
Q(S_t,A_t) = Q(S_t,A_t) + \alpha[R_{t+1}+\gamma Q(S_{t+1},A_{t+1})-Q(S_t,A_t)].优化的伪代码如下
off-policy优化
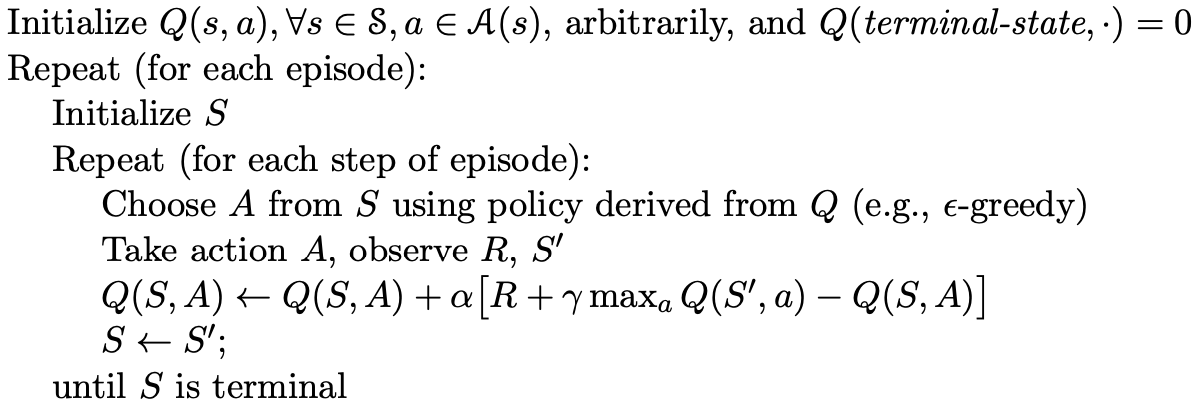
off-policy优化说的是控制策略和目标策略不一致的优化方法,这里控制策略依然是采用 \epsilon-greedy 方法,而目标策略则直接是最优策略 \pi_*,动作值函数更新方法为
Q(S_t,A_t) = Q(S_t,A_t) + \alpha[R_{t+1}+\gamma \max_aQ(S_{t+1},a)-Q(S_t,A_t)].优化的伪代码如下
总结
以上就是时间差分方法,基于以前分享过的basic的知识,对于时间差分的学习就很简单了,下次我们分享强化学习中的Eligibility\ Traces。